Preparing food often involves peeling vegetables, so humanoid robots must master this task if they are to assist us in cooking.
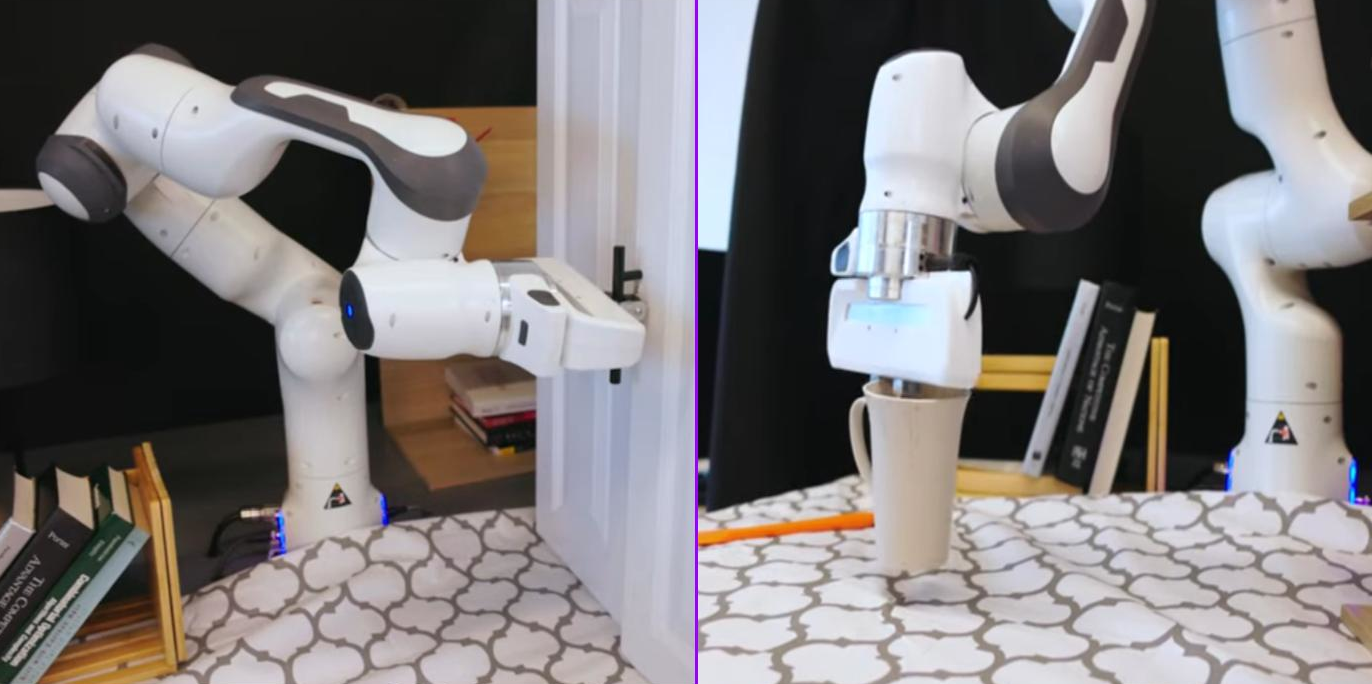
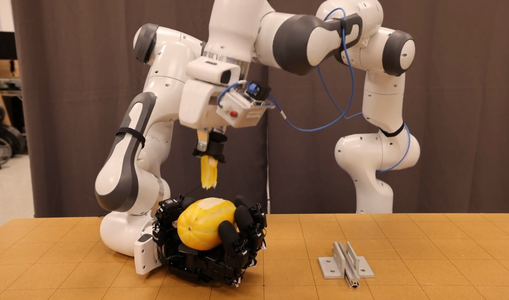
In a collaborative effort, MIT and Toyota researchers have designed a robotic system that replicates the human technique of vegetable peeling. A video accompanying their research highlights a robotic arm equipped with a peeler and a hand gripping a squash. The peeler strips away the outer skin, and subsequently, the hand maneuvers the squash to reveal the unpeeled section. This iterative process of peeling and repositioning continues until the vegetable is completely peeled.
For peeling, the researchers used a Franka robotic arm, controlled remotely by a human or automatically via a computer vision system. Their achievement focused on developing a system for rotating and reorienting the hand holding the vegetable and redirecting it to the peeler.
The system for controlling the vegetable orientation was trained using reinforcement learning. The hand gradually learns when to stop rotating the vegetable based on information about the position of the hand and fingers, as well as the position of the vegetable piece and the peeler. The researchers did not rely on the camera to determine when the peeled part disappears.
Peeling was tested on various types of vegetables such as potatoes and cucumbers, and in different sizes of each type, demonstrating the system’s skill and ability to handle different types of vegetables.
The control system showed some minor errors, as it may sometimes misdirect the vegetable and fail to control small-sized vegetables.
The researchers plan to overcome these errors by reorienting based on visual data from the camera to more accurately determine when the hand should stop rotating the vegetable.