Quadruped robots are used in factories and shopping centers for inspections and to detect potential hazards such as thermal and gas leaks and overheating. However, they struggle to navigate many places with ladders, requiring humans to periodically climb and inspect the most difficult and dangerous areas.
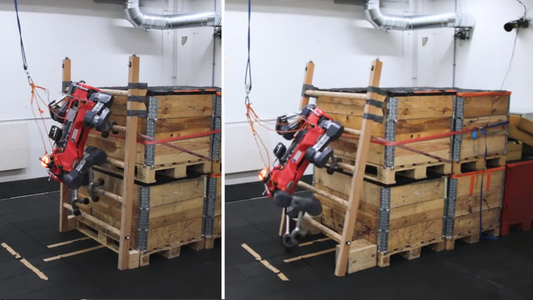
To address this, a team of robotic researchers and engineers at ETH Zurich in Switzerland trained the quadruped robot ANYbotics ANYMal to climb regular ladders quickly and agilely. The team found that the robot’s legs, equipped with spherical or flat feet, did not help with stability during upward movement. They designed a hooked end-effector with a gripping ability similar to a hook, generating the necessary force for climbing. They then used reinforcement learning to train the robot on how to use its hooks to climb ladders of varying heights, lengths, and inclines.
The training was done using simulations, where the robot was trained to climb a large number of different and varied ladders in multiple environments, enabling it to climb any type of ladders it might encounter in real-world settings. After completing the training and transferring the control policy learned in the simulation to a real robot, the researchers tested the robot in real environments containing various types of ladders. The robot succeeded in climbing 90% of the time, outperforming other robots and the same robot without the hooked end-effector.
The researchers aim to enable quadruped robots to descend ladders and improve the hook end-effector in future work to make them faster and more efficient.