Companies are striving to train robots to function in any environment, a complex task due to the vast diversity and subtle differences that can challenge AI models. While creating a all-environments general-purpose robot may be a lofty goal, consumers often seek robots tailored to their specific homes and kitchens.
To address this, MIT researchers have developed a more cost-effective and practical approach to robot training. This method involves training the robot in a simulated version of its intended environment before deploying it in the real world.
First, a regular smartphone camera captures images of the home, which are then converted into a 3D simulation. The robot is designed to train within this simulation, experimenting with various scenarios and learning through trial and error, a technique known as reinforcement learning. This allows the robot to avoid physical damage in the real world while mastering its tasks.
The researchers have named this approach RailTO, could be short for “Real to Simulation to Real”. Essentially, the robot’s initial training on real-world data is transferred to the simulation. It then undergoes enhanced training in the simulation before being deployed in the real world with its improved skills.
This method offers several advantages, including increased safety, speed, and cost-effectiveness. However, models trained in simulation may encounter unexpected challenges in the real world, as no simulation can perfectly replicate every variable.
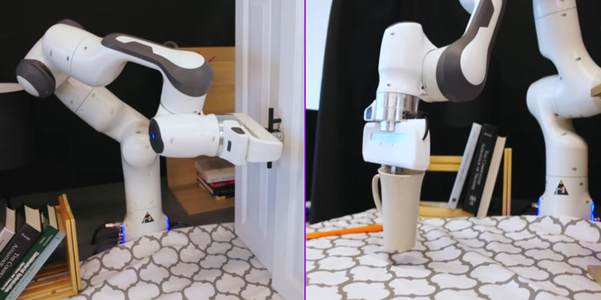
Despite this, experimental results have demonstrated the effectiveness of RailTO in improving robot performance. The method was evaluated on various tasks, such as stacking dishes and placing books on shelves, and consistently yielded a significant improvement in accuracy compared to training solely on real-world data.
The development of RailTO brings us closer to a future where home robots can be customized to excel in specific environments, leading to improved performance, reduced errors, and faster deployment.